Basic Usage
This will walk you through setting up your first manipulator and complete simulation.
On this page
Set up a definition file
SoMo manipulators are defined as dictionaries describing one or more actuators, each of which is made up of several links and joints.
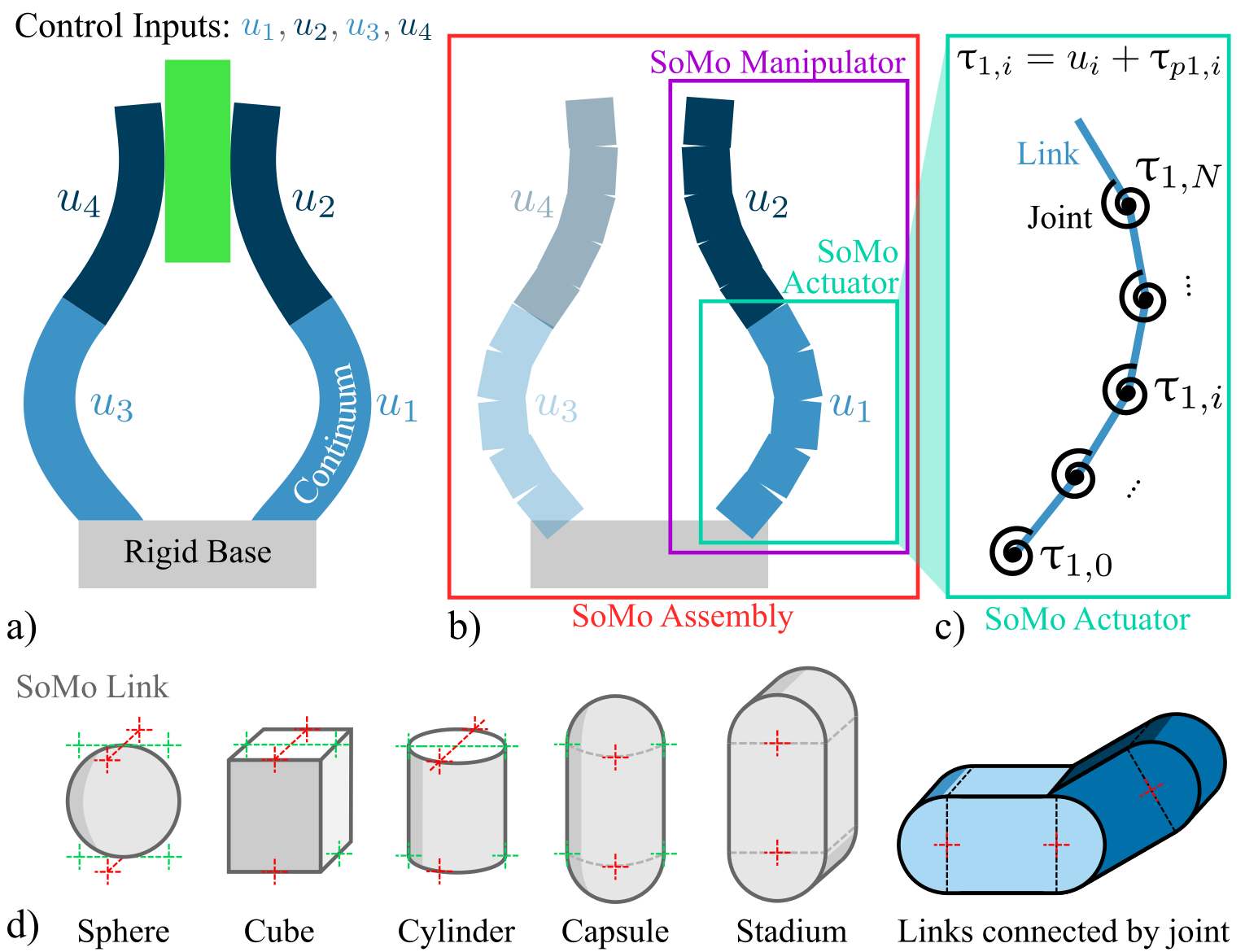
Here is an example of a typical definition of a soft finger made up of one bending actuator. You can copy this or directly download it:
ihm_finger_def.yaml
Build a SoMo Manipulator from a definition
Note
This documentation is coming soon!
Load the definition from a file directly
Note
TODO
Modify a definition before creating
SoMo definitions are just python dictionaries, so you can load them in, make modifications, then instantiate a manipulator object.
Control a manipulator
Note
TODO